
Autonomer elektrischer Subsea-Antrieb
- Eintauchen 150 m
- Drehmoment 50 bis 200 Nm
- Lauf 60°
- Kontrolle in absoluter Position
- Mehrere Kommunikationsprotokolle
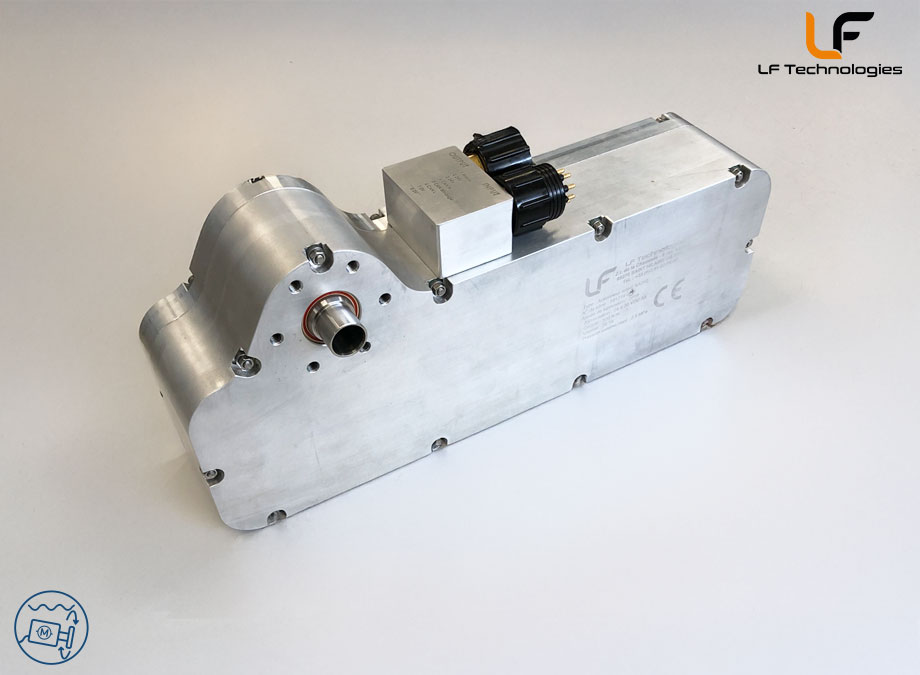
Die Unterwasser-Drehantriebe der Baureihe XAR-A von LF Technologies sind elektrische Unterwasser-Drehantriebe, die speziell für Unterwasseranwendungen entwickelt wurden.
Dank ihres radialen Abtriebs und der durchgehenden Hohlwelle eignen sich diese Antriebe besonders für Rudermanöver mit hohem Drehmoment bei begrenzten Hüben und können direkt um die Manöverwelle herum montiert werden. Ihre hohe Dynamik ermöglicht schnelle Richtungsänderungen.
Funktionen des XAR-A Unterwasser-Drehantriebs :
- Integrierte Steuerung: eingebettete Elektronik, die eine präzise Steuerung von Position und Geschwindigkeit direkt im Aktuator ermöglicht.
- Absolute Positionsmessung: Integrierte absolute Positionsmessung: keine Nullpunktsuche erforderlich.
- Mehrere Kommunikationsprotokolle: Kompatibel mit mehreren Protokollen wie CAN, RS232, RS485, Ethernet TCP, Ethernet UDP, Modbus TCP, auf Wunsch mit Anpassungsmöglichkeiten.
- Flexibilität bei der Befestigung: Verschiedene Befestigungs- und Antriebsoptionen erleichtern die mechanische Integration in verschiedene Unterwassersysteme.
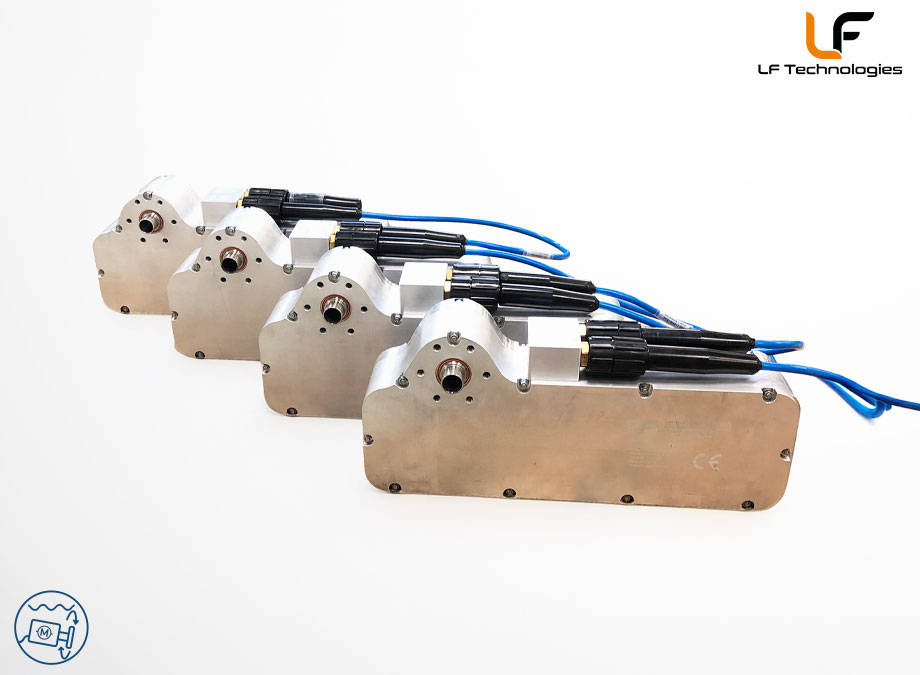
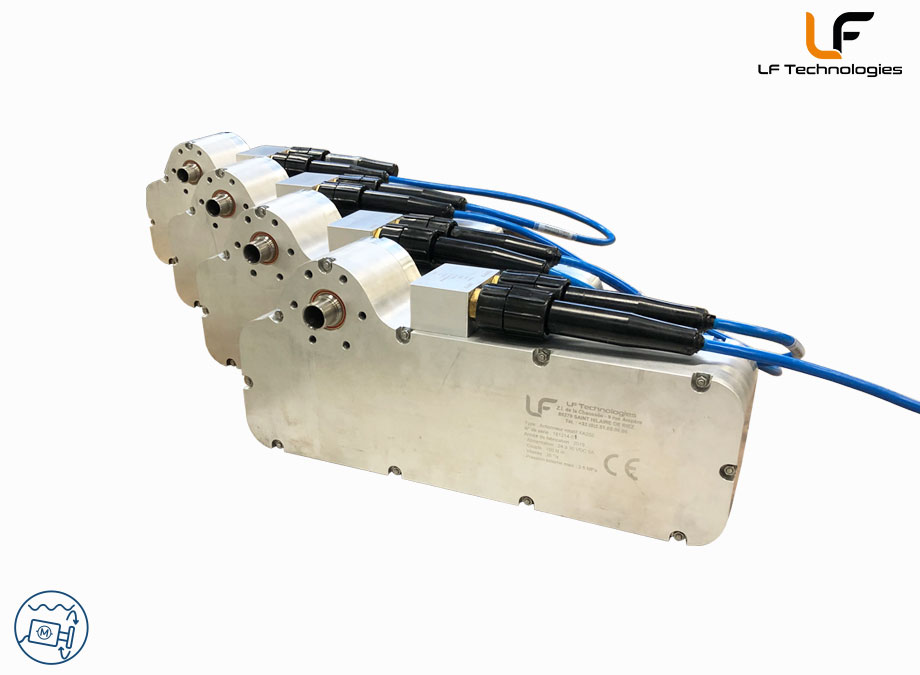
- Verkettung: Jeder Aktor ist mit 2 Anschlüssen (1 In und 1 Out) ausgestattet, mit denen Sie mehrere Aktoren verketten können, um den Verkabelungsaufwand in Ihrem System zu begrenzen.
Validierung & Tests von XAR-A Unterwasser-Drehantrieben
Alle von LF Technologies entwickelten Drehantriebe für U-Boote werden vollständig intern getestet:
- Umfassende Funktionstests: Tests, die in Luft und unter Wasser unter echter Belastung durchgeführt werden;
- Strenge Dichtigkeitsprüfungen: Validierung der Dichtigkeit bis zum maximal zulässigen Druck.
- Überprüfung der Kommunikationsprotokolle: Überprüfung der korrekten Funktionsweise gemäß dem vom Kunden gewählten Protokoll (CAN, RS232, RS485, Ethernet TCP, Ethernet UDP, Modbus TCP, Protokolle auf Anfrage).
- Umfassende Energieanalyse : Messung des Strom- und Leistungsverbrauchs in verschiedenen Nutzungsszenarien.
Funktionen auf Anfrage :
- Versorgungsspannung
- Kommunikationsprotokoll
- Materialien
- Elektromechanische Bremse
- Elektrische Anschlüsse
- Mechanische Schnittstellen und Befestigungen
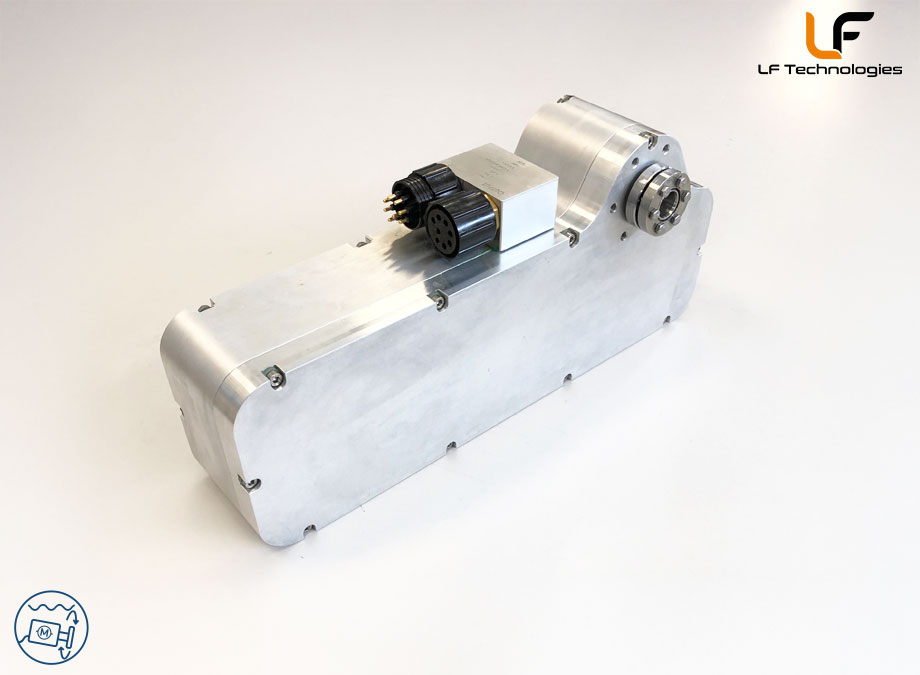
Drehantrieb für U-Boote und Offshore-Ausrüstung – zoom rotation
Drehantrieb für U-Boote und Offshore-Ausrüstung - zoom rotation
Drehantrieb für U-Boote und Offshore-Ausrüstung – zoom rotation
Drehantrieb für U-Boote und Offshore-Ausrüstung - zoom rotation
Drehantrieb für Unterseeboote und Offshore- & Subsea-Ausrüstungen
Drehantrieb für Unterseeboote und Offshore- & Subsea-Ausrüstungen
Drehantrieb für U-Boote und Offshore-Ausrüstung
Drehantrieb für U-Boote und Offshore-Ausrüstung

Drehantrieb für U-Boote und Subsea-Ausrüstung
Drehantrieb für U-Boote und Subsea-Ausrüstung
TECHNISCHE DATEN Elektrischer Subsea-Antrieb- XAR-A-Reihe
Spezifikationen | XAR-A/50 | XAR-A/100 | XAR-A/200 |
Tiefe Max. | 150 msw* /15 bar | 150 msw* /15 bar | 150 msw* /15 bar |
Nutzbares Drehmoment max | 50 Nm | 100 Nm | 200 Nm |
Geschwindigkeit max | 100°/s | 60°/s | 30°/s |
Hub | ± 30° | ± 30° | ± 30° |
Absolute Positionsmessung | ± 0.2° | ± 0.2° | ± 0.2° |
Versorgungsspannung | 24 - 72 Vdc | 24 - 72 Vdc | 24 - 72 Vdc |
Stromstärke max. | 5 A | 5 A | 5 A |
Steckverbinder | 1x SubConn 8 Kontakte | 1x SubConn 8 Kontakte | 1x SubConn 8 Kontakte |
Ausrichtung Steckverbinder | radial, parallel oder senkrecht | radial, parallel oder senkrecht | radial, parallel oder senkrecht |
Bremse | Auf Option | Auf Option | Auf Option |
Welle | Voll oder hohl | Voll oder hohl | Voll oder hohl |
Kupplung | Schrumpfscheibe, Nut, Keil | Schrumpfscheibe, Nut, Keil | Schrumpfscheibe, Nut, Keil |
Material Körper | Aluminium oder Edelstahl 316L oder Titan Grad 5 | Aluminium oder Edelstahl 316L oder Titan Grad 5 | Aluminium oder Edelstahl 316L oder Titan Grad 5 |
Werkstoff Welle | Edelstahl 316L oder Titan Grad 5 | Edelstahl 316L oder Titan Grad 5 | Edelstahl 316L oder Titan Grad 5 |
*Metre Sea Water | |||

Haben Sie ein Projekt?
Ich höre Ihnen gerne zu, um Sie zu beraten und Ihnen Lösungen vorzuschlagen, die Ihren Bedürfnissen entsprechen.
Thibault Marchand
Abteilung Subsea



